研究トピックス TOPICS
- ホーム
- 研究トピックス一覧
- 数学科の研究トピックス一覧
- 研究トピックス
歩行パターンの自己組織化に向けた試み:パラメーター自動調整アルゴリズムの提案
【数学科】上田 肇一
動物の歩行リズムの生成機構の解明は神経科学やロボット工学において重要な課題である。動物の歩行リズムは,時間周期的な神経細胞の発火活動と神経細胞同士の適切な相互作用によって発生すると考えられているが,四足歩行で観察されるウォーク,トロット,ペースなどの歩行パターンが発生する仕組みや,歩行パターン間の遷移を実現する仕組みについては未解決問題が残されている。初期に提案されたモデル(文献[1])では神経細胞の発火活動が単純な振動子として表現され,各脚に対応する振動子同士の相互作用を考慮した結合振動子モデルが提案された。
\begin{equation} \begin{aligned} \frac{dx_{1}}{dt} &= y_{1} - \alpha x_{1}\left(\frac{x_{1}^{2}}{3}-1\right) + \beta +\varepsilon x_{1}^{2} + \gamma(x_{1} - x_{2})+ \delta (x_{1} - x_{4})\\ \frac{dx_{2}}{dt} &= y_{2} - \alpha x_{2}\left(\frac{x_{2}^{2}}{3}-1\right) + \beta +\varepsilon x_{2}^{2} + \gamma(x_{2} - x_{1})+ \delta (x_{2} - x_{3})\\ \frac{dx_{3}}{dt} &= y_{3} - \alpha x_{3}\left(\frac{x_{3}^{2}}{3}-1\right) + \beta +\varepsilon x_{3}^{2} + \gamma(x_{3} - x_{4})+ \delta (x_{3} - x_{2})\\ \frac{dx_{4}}{dt} &= y_{4} - \alpha x_{4}\left(\frac{x_{4}^{2}}{3}-1\right) + \beta +\varepsilon x_{4}^{2} + \gamma(x_{4} - x_{3})+ \delta (x_{4} - x_{1})\\ \frac{dy_{j}}{dt} &= - x_{j}\quad (j=1,2,3,4) \end{aligned} \end{equation}
変数の添字1,2,3,4はそれぞれ左前,右前,左後,右後の脚に対応している。$x_{j}$の方程式の右辺第1項から第4項が振動子に対応し,第5項,第6項が振動子間の相互作用に対応する。数値シミュレーション結果(詳細は文献[1])の例を図1(b)に示す。
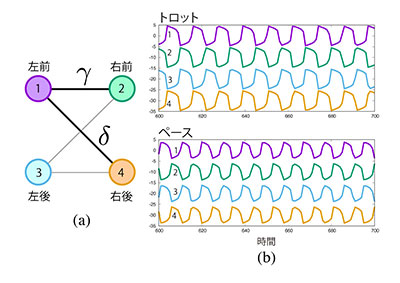
(b) 数値実験結果(上:(α,β,γ,δ,ε) =(1, 0, 2, 0.01, 0.01)。
下:(α,β,γ,δ,ε) = (1, 0, 0.5, 0.7, 0.1))。
我々の研究室でも歩行や細胞運動に関わる数理モデル作成を行っており,数理モデルの作成と数値シミュレーションを行っている。現象を計算機上で再現するために必要となるパラメーター探索作業は宝探しのような要素があり,現象が再現されない段階では数理モデルの式が間違っているのか,それともパラメーター探索範囲が十分でないのか(宝はあると信じてパラメーター探索を続けるべきか,宝は無いと判断し撤退すべきか)判断に迷う時もある(そのため,パラメーターを発見したときはとても嬉しい!)。方程式(1)にも5つのパラメーター$\alpha,\beta,\gamma,\delta,\varepsilon$が含まれており,それらの値の組合せを試すのもなかなか大変な作業である。しかし,パラメーターの数が数千,数万になった場合には根気だけで乗り切れるであろうか?近年,計算機処理速度の向上に伴い,科学分野,産業分野において数値シミュレーションの果たす役割は大きくなってきているが,対象とする現象も複雑かつ巨大化しているため,調整するパラメーターの数も膨大なものになっている。そのため,方程式のパラメーター探索を自動化するアルゴリズムの開発が重要になる。 人工知能(機械学習,深層学習など)を活用した手法も有力な候補の一つだろう。
我々の研究室では,これまで研究を続けてきたパターン形成の「自己組織化現象」の数理モデルと生物進化における「淘汰」の発想を融合させたパラメーター自動調整アルゴリズムを用いて,環境適応機能を有する新たな制御システムを提案することを目標にしている。もっとも簡単な例として,2つの振動子群同士の同期現象を考える(図2(a))。ここで考える設定は
- 各集団に属する振動子は振動子群間の結合強度に関わるパラメーターを持ち,それらの値はある区間内でランダムに与えられる
- 振動子のいくつかはある時間ステップ毎に淘汰され,別のパラメーター値を持つ新たな振動子に置き換えられる
- 淘汰される基準(選択圧)は振動振幅の時間平均とする
提案アルゴリズムの特徴として次が挙げられる。
- 適切な選択圧の採用により,複数のパラメーター値を同時に自動調整できる
- 同期現象を発生させる振動子群のパラメーター値分布を制御する関数はその振動子群内の変数のみによって記述される(他方の振動子群のパラメーター分布に依存しない)
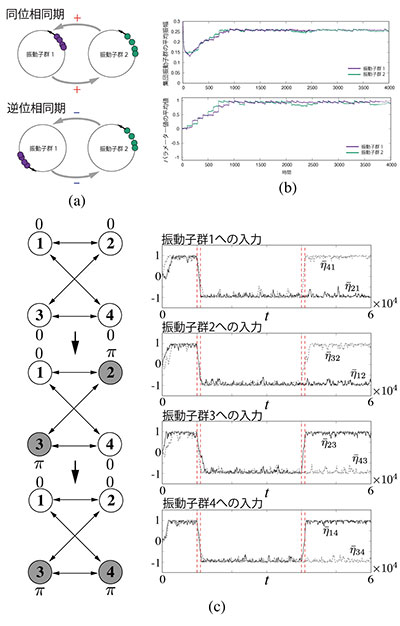
集団振動子群同士の結合係数の符号に応じて同位相同期または
逆位相同期が発生する。
(b) 文献[2]で提案したアルゴリズムを適用した際の数値実験結果。
時間が経つにつれて振動子群1から2に及ぼす作用,及び 振動子群2から1に及ぼす 作用が$+/+$になり,振動振幅も増大していく様子を示している。
(c) 左:4振動子群が同期状態になった際の位相差,
及び$t=1.0\times 10^{4}$,$t=4.0\times 10^{4}$に外力を加えた際の遷移の様子。 振動子の上に記載している$0$及び$\pi$は振動子1を基準にしたときの位相差である。右:各振動子群への入力係数の平均値$\bar{\eta}_{*}$の時系列。外力を加えた後に相互作用係数が自動的に変化する様子が観察される。
- Collins, James J., and Ian N. Stewart. "Coupled nonlinear oscillators and the symmetries of animal gaits." Journal of Nonlinear Science 3.1 (1993): 349-392.
- Ueda, Kei-Ichi. "Model framework for emergence of synchronized oscillations." Physical Review E 100.3 (2019): 032218.